161 Courses
-
IDEO: Principles of Product Design
-

Career Development
-

Building a Personal Gratification Company
-

Follow Your Passion
-

Design is Risk-Taking
-

Hire Great People
-

The Process of Design
-

Product Development Process: Observation
-

Designing Products vs Designing Experiences
-

Design as an Iterative Process
-

Prototyping the Mouse
-

Career Advice
-

How do You Pick Clients?
-
-
InCube Labs: Problem Analysis at the Cellular Level
-
Innovation and Inertia
-

Innovation Crisis at Established Enterprises
-

Innovation and Inertia
-

Market Maturity Life Cycle
-

Innovation Zones
-

Classes of Innovations in the Product Leadership Zone
-

Fractal Markets
-

Customer Intimacy Zone
-

Operational Excellence Zone
-

McKinsey's 7S's Model
-

Core and Context
-

Inertia: Residue of Innovation
-
-
Innovative Solutions for Dealing with Security Issues
-
Introduction to Chemical Engineering
-
Introduction to Chemical Engineering I
-

Introduction to Chemical Engineering II
-
Introduction to Chemical Engineering III
-

Introduction to Chemical Engineering IV
-

Introduction to Chemical Engineering V
-

Introduction to Chemical Engineering VI
-
Introduction to Chemical Engineering VII
-
Introduction to Chemical Engineering VIII
-
Introduction to Chemical Engineering IX
-

Introduction to Chemical Engineering X
-

Introduction to Chemical Engineering XI
-

Introduction to Chemical Engineering XII
-
Introduction to Chemical Engineering XIII
-

Introduction to Chemical Engineering XIV
-

Pharmacokinetics: Modeling Drug Delivery in the Human Body
-

Introduction to Chemical Engineering XVI
-
Introduction to Chemical Engineering XVII
-
Introduction to Chemical Engineering XVIII
-

Introduction to Chemical Engineering XIX
-
Introduction to Chemical Engineering XX
-
-
Introduction to Databases
-
Introduction to Linear Dynamical Systems
-
Overview of Linear Dynamical Systems
-

Linear Functions (Continued)
-
Linearization (Continued)
-

Nullspace of a Matrix (Continued)
-

Orthonormal Set of Vectors
-

Least-Squares
-
Least-Squares Polynomial Fitting
-

Multi-Objective Least-Squares
-

Least-Norm Solution
-

Examples of Autonomous Linear Dynamical Systems
-
Solution via Laplace Transform and Matrix Exponential
-

Time Transfer Property
-

Markov Chain (Example)
-

Jordan Canonical Form
-

DC or Static Gain Matrix
-

RC Circuit (Example)
-

Gain of a Matrix in a Direction
-

Sensitivity of Linear Equations to Data Error
-

Reachability
-
Continuous-Time Reachability
-
-
Introduction to Robotics
-
Course Overview
-
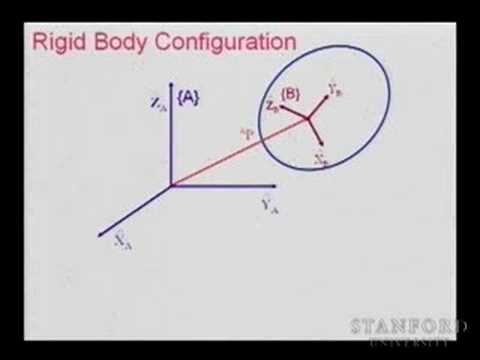
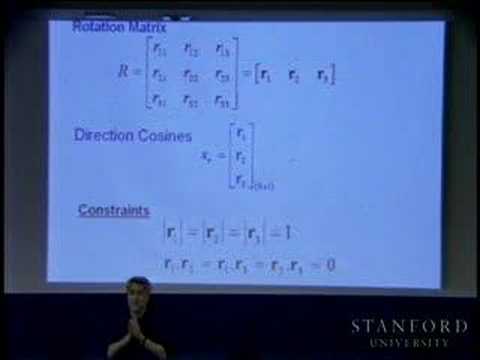
Spatial Descriptions
-
Homogeneous Transform Interpretations
-

Manipulator Kinematics
-
Summary - Frame Attachment
-

Instantaneous Kinematics
-
Jacobian - Explicit Form
-

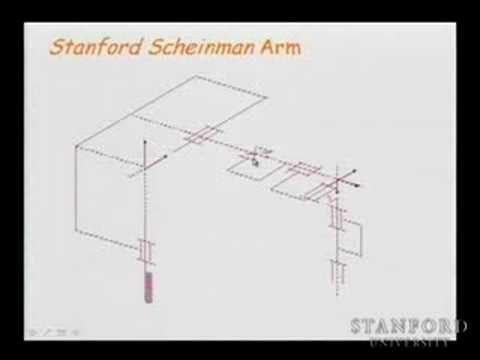
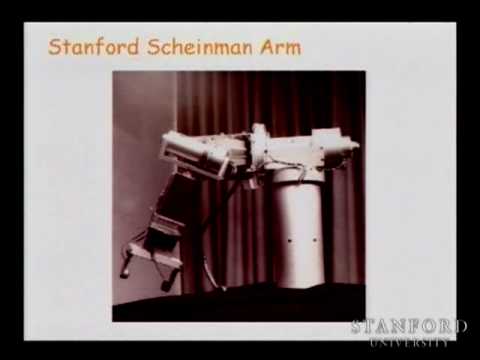
Scheinman Arm - Demo
-
Intro - Guest Lecturer: Gregory Hager
-
Guest Lecturer: Krasimir Kolarov
-

Joint Space Dynamics
-
Lagrange Equations
-
Control - Overview
-
PD Control
-

Manipulator Control
-

Compliance
-
-
Intuitive Surgical: Technology Adoption













